搬运机器人双光云台:优化厂区无人搬运风控能力
无人搬运普及,厂区风控面临全新挑战
随着工业厂区智能化改造提速,无人搬运机器人已经成为物料转运、货品输送的核心设备,广泛应用于工矿厂区、仓储车间、生产廊道等场景。厂区作业环境复杂,设备堆叠密集、物料摆放零散,且存在光线明暗交替、粉尘漂浮、夜间无照明等工况,给无人搬运作业带来不少隐患。
传统搬运机器人大多搭载单一视觉模块,仅能依靠可见光画面识别路况与障碍物。一旦遇到暗光、逆光、粉尘遮挡等情况,识别精度会大幅下降,容易出现避障失误、路径偏移、漏判障碍物等问题,不仅影响搬运效率,还会引发碰撞、物料损毁等安全事故,这也是厂区无人化风控管理的核心痛点。

双光云台赋能,构建全天候立体视觉体系
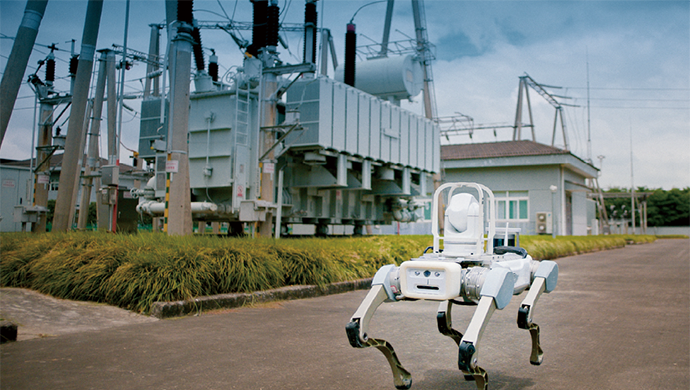
双光云台的落地应用,彻底补齐了传统搬运机器人的视觉感知短板。设备集成可见光高清成像与红外热成像双模块,通过AI融合算法实现双光谱数据联动分析,打破了单一视觉的环境局限,让机器人拥有全天候、全场景的感知能力。
可见光镜头负责高清捕捉厂区实景,精准识别静态物料、设备轮廓、通道标线、堆放货物等常规障碍物,保障日常常态搬运的路径规划精准度。红外成像模块不依赖环境光源,不受粉尘、暗光、阴影干扰,可快速识别低温、高温物体以及肉眼难以分辨的遮挡障碍物,同时排查周边设备异常发热隐患,实现路况识别与安全监测双向兼顾。
精准避障预判,升级无人搬运风控体系
厂区无人搬运的风控核心,在于提前预判风险、主动规避隐患。搭载双光云台的搬运机器人,不再是被动感应避障,而是依托立体视觉感知实现主动风控。机器人行进过程中,云台可多角度动态扫描周边环境,覆盖通道死角、设备间隙等盲区区域,实时完善环境建模数据。
遇到突发障碍物、临时堆放物料、人员误入作业区域时,设备可快速识别、及时减速停行或调整行进路径,有效杜绝碰撞事故。相比传统单一传感设备,它能精准区分静态障碍物与动态风险源,大幅降低误判、漏判概率,让无人搬运作业的安全性大幅提升。
适配复杂工况,保障厂区作业稳定运行
工业厂区昼夜不间断作业的模式,对设备稳定性有着极高要求。双光云台采用工业级密封防护设计,防尘、抗干扰、耐磨损,能够适配厂区复杂恶劣的作业环境,长期稳定运行无故障。设备可自动切换昼夜感知模式,白天抵御强光干扰,夜间依托红外光谱持续作业,真正实现24小时不间断安全搬运。
持续稳定的视觉感知能力,让无人搬运机器人无需频繁停机检修,既保障了厂区物料转运的高效流转,又简化了人工风控巡查压力,减少人工干预成本。
结语
双光云台为搬运机器人赋予了全方位、全天候的立体视觉感知能力,从源头优化了厂区无人搬运的风险控制体系。通过双光谱融合技术破解复杂工况下的识别难题,精准规避各类作业风险,兼顾了生产效率与安全管控,为工业厂区无人化、智能化、安全化升级提供了可靠的技术支撑。